5. Dynamic Movements
5.1 Resonant Frequency
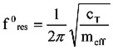
Piezo actuators are oscillating mechanical systems, characterized by the resonant frequency fres. The resonant frequency is determined by the stiffness and the mass distribution (effective moved mass) within the actuator. Actuators from piezosystem jena reach resonant frequencies of up to 50kHz.

That is why the resonant frequency of a complete system can deviate considerably from the resonant frequency of the single actuator. This is an important fact for example when using the mirror for fast tilting. Actuators using a lever transmission for larger motions, get resonant frequencies typically within the range of 300Hz up to 1.5kHz.
In our product data sheets for some elements not only the resonant frequency is given, but also the effective mass. Knowing the effective mass it is possible to estimate the resonant frequency with an additional mass (using formula 5.1.2.).
You will find more information about the simulation of dynamic properties in chapter 7.
Please note:
Because of the complexity of this field, such calculations give only approximate values. These values should be experimentally verified by tests.
Example number 18
The resonant frequency of the actuator PA 25/12 is f0res = 12kHz. The effective mass can be estimated by meff = 10g. This actuator has to tilt a mirror with a mass M = 150g. Because of this mass, the resonant frequency changes to f1res = 3kHz.
Moving with the resonant frequency, the amplitude of the actuator is much higher as in the non-resonant case. Actuators with a lever transmission show super-elevations up to 30 times and higher in comparison to the non-resonant case.
When working with frequencies near the resonant frequency, one needs a much lower voltage for the same result. But please be careful! This advantage can damage your actuator if the motion exceeds the motion for maximum voltage in the non-resonant case!
We strongly recommend: Actuators should be used with frequencies of approximately 80% of the resonant frequency. Please consider also the heating of piezoelectrical elements while in dynamic motion.
5.2. Rise Time
Because of their high resonant frequency, piezoactuators are well suited for fast motions. Applications have been in valve technology and for fast shutters. The shortest rise time tmin, which an actuator needs for expansion, is determined by its resonant frequency.

When an actuator is given a short electrical pulse, the actuator expands within its rise time tmin. Simultaneously, the actuator´s resonant frequency will be excited. So it begins to oscillate with a damped oscillation relative to its position. A shorter electrical pulse can result in a higher super-elevation but not in shorter rise times!
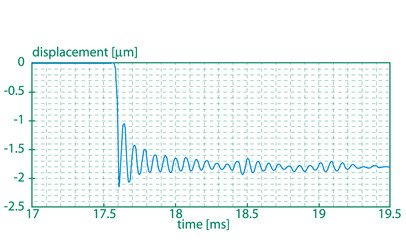
The figure shows a typical answer to a short electrical excitation of a piezoactuator PAHL 40/20 from piezosystem jena. Although the excitation pulse has a duration of approximately 8µs the rise time of the actuator is only 20µs. This value agrees with the resonant frequency of 16kHz.
5.3 Dynamic Forces
While working in the dynamical regime, compressive stress and tensile forces act on piezoelectrical actuators. The compressive strength of piezoactuators is very high, but they are very sensitive to tensile strength. But both forces Fdyn occur in the same order while moving dynamically (formula given for sinusoidal oscillation).
Δl/2 – magnitude of the oscillation (Δl full motion of the actuator).
meff – effective mass
φ – angle of the phases of the oscillation.
Example number 19
An actuator with a motion of 20µm and an operating frequency of 10kHz has an acceleration of 39500m/s2. This value exceeds the acceleration of the earth by 4000 times.
Please consider dynamical forces while in dynamical motion. They also appear without external loads.
That is why it is necessary to use pre-loaded actuators for dynamic applications. PA or PAHL signify pre-loaded actuators from piezosystem jena.
Actuators without pre-load can only be used for small motions in special cases!
Please note: When working under dynamical conditions, the current, which will be needed for the motion, can reach large and critical values. For calculation of the required current, see also section 10, especially section 10.2. and 10.3.
Piezo Principles Topics
- 2) Design
- 10) Electronics
- 14) Piezo Shakers