5. Dynamisches Verhalten
5.1 Resonanzfrequenz
Ein Piezoaktor stellt ein schwingungsfähiges System dar. Dieses wird durch seine Resonanzfrequenz fres charakterisiert. Die Resonanzfrequenz eines einseitig eingespannten, unbelasteten Aktors wird bestimmt durch seine elastischen Eigenschaften und die effektiv bewegte Masse. Typische Werte für Piezoaktoren von piezosystem jena erreichen Resonanzfrequenzen von bis zu 50kHz.
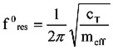
cT – Steifigkeit des Aktors; meff – effektiv bewegte Masse
Eine zusätzliche durch den Translator zu bewegende Masse M führt zu einer Verringerung der Resonanzfrequenz.

Damit kann die Resonanzfrequenz einer ganz bestimmten Anordnung erheblich von den angegebenen Werten für den jeweiligen Aktor abweichen.
Die Verwendung von Hebelübersetzungen zur Vergrößerung des Aktorhubes führt zu Resonanzfrequenzen von zwischen 300Hz und 3kHz.
Die effektive Masse kann auch aus f°res und cT (Formel 5.1.1.) oder auch aus konstruktiven Betrachtungen abgeschätzt werden. Mit diesen Werten lassen sich die veränderten Resonanzfrequenzen unter Belastung bestimmen (durch Anwendung von Formel 5.1.2.). Sie finden mehr Informationen über die Simulation von dynamischen Eigenschaften in Kapitel 7.
Achtung!
Aufgrund der großen Komplexität des Gebietes können diese Werte nur Richtwerte darstellen. In der Mehrzahl stellen angegebene Werte in Tabellen und Datenblättern Kleinsignalwerte dar. Diese können sich im Großsignalbetrieb erheblich verändern.
Aus Formeln berechnete Werte sollten auf jeden Fall experimentell überprüft werden!
Beispiel 18:
Der Aktor PA 25/12 hat eine Resonanzfrequenz von f°res= 12kHz. Die effektive Masse beträgt ca. 10g. Dieser Aktor soll einen Spiegel mit der Masse M = 150g bewegen. Die Resonanzfrequenz ändert sich entsprechend Gleichung (5.1.2.) auf f°res = 3kHz.
In der Resonanz nimmt die Auslenkung um ein Vielfaches gegenüber der Auslenkung im herkömmlichen Betrieb zu. Verschiedene wegübersetzte Piezoelemente von piezosystem jena zeigen Resonanzüberhöhungen bis zu dem 30fachen des Hubes bei nichtresonanter Ansteuerung.
Im Bereich der Resonanzfrequenz lässt sich somit mit einer wesentlich geringeren Ansteuerspannung der gleiche Hub erreichen wie bei der nicht resonanten Ansteuerung. Dieses kann für verschiedene Anwendungen von Vorteil sein, andererseits besteht die Gefahr der mechanischen Zerstörung des Piezoelementes.
Wir empfehlen dringend:
Deshalb sollte in der Regel ein Piezotranslator bei voller Aussteuerung, nur bis etwa 80 % seiner Resonanzfrequenz betrieben werden. Wenn der Resonanzbereich durchfahren wird, sollte die Amplitude deutlich unter 10% des Nennhubes liegen! Beachten Sie bitte auch die Erwärmung von Piezoaktoren bei dynamischer Ansteuerung!
5.2. Anstiegszeiten
Durch ihre hohen Resonanzfrequenzen sind Piezoaktoren für schnelle Bewegungen besonders geeignet. Dieses betrifft z.B. Anwendungen in der Lasertechnik, schnelle Schalter und Scanelemente. Die kürzeste Zeit tmin die ein Element in diesem Fall zum Erreichen seines Nennhubes benötigt, berechnet sich zu:

Wird ein Piezoaktor mit einem kurzen Spannungsimpuls angesteuert, so dehnt er sich innerhalb der Anstiegszeit tmin aus. Dabei wird seine Resonanzfrequenz angeregt, der Piezoaktor führt um seine Endlage eine gedämpfte Schwingung mit seiner Resonanzfrequenz aus. Eine weitere Verkürzung des Ansteuerimpulses führt zu einer weiteren Überhöhung der angeregten Schwingung – nicht aber zu einer Verkürzung der Anstiegszeit.
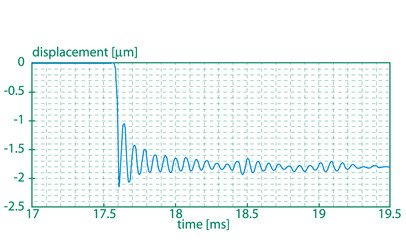
Abb. 5.2.1. Impulsantwort eines Piezoaktors der PAHL Serie auf einen Spannungsprung von 20V
Im Bild 5.2.1. ist eine typische Impulsantwort eines Piezoelementes der Serie PAHL von piezosystem jena dargestellt. Obwohl der Spannungsimpuls eine Zeitdauer von 8µs aufwies, wurde eine Anstiegszeit von 20µs gemessen. Die Frequenz der angeregten Schwingung beträgt 16kHz und entspricht der Resonanzfrequenz dieses eingesetzten Elementes.
5.3 Dynamische Kräfte
Im dynamischen Betrieb von Piezoaktoren können z.T. erhebliche Druck- und Zugkräfte auftreten. Während ein gestapelter Piezoaktor mit hohem Druck belastet werden kann, so ist er doch sehr empfindlich gegenüber Zugkräften.
Bei einem sinusförmigen Betrieb mit der Frequenz fdyn treten folgende Druck- und Zugkräfte im Piezoelement auf:
Δl0/2 – Schwinungsamplitude (Δl0 – Aktorhub);
eff – effektive Masse
Damit wird das Keramikmaterial sehr großen Beschleunigungen ausgesetzt:
Phasenwinkel der Schwingung
Beispiel 19:
Für einen Piezotranslator mit einem Nennhub von 20µm und einer Arbeitsfrequenz von 10kHz ergibt sich die maximale Beschleunigung in den Umkehrpunkten von a = 39500m/s². Dieser Wert entspricht immerhin dem 4000fachen Wert der Erdbeschleunigung.
Auch wenn der Piezoaktor nicht gegen eine äußere Kraft arbeitet, so müssen die auftretenden Druck- und Zugkräfte bei dynamischer Ansteuerung beachtet werden.
Bei dynamischen Ansteuerungen sollten also unbedingt vorgespannte Aktoren verwendet werden. Diese sind bei piezosystem jena durch die Bezeichnung PA, PA/T, PAHL bzw. RA gekennzeichnet. Ausnahmen sind Anwendungen mit sehr kleinen benötigten Wegen. Hier können unter Umständen auch nicht vorgespannte Piezoaktoren eingesetzt werden.
Lassen Sie sich bei dynamischen Anwendungen auf jeden Fall durch unsere Mitarbeiter beraten!
Beachten Sie bitte:
Bei dynamischen Anwendungen entsteht ein bedeutender Strombedarf, die Ausgangsleistung und der Ausgangsstrom der verwendeten Spannungsverstärker bestimmen dabei oft die mögliche Dynamik der Bewegung (für die Berechnung den benötigten Strom siehe auch Kapitel 10: Elektronische Ansteuerung, Spannungsverstärker).
Piezoprinzip-Themen
- 1) Piezoelektrischer Effekt
- 2) Bauformen
- 3) Eigenschaften und Leistung
- 4) Statisches Verhalten
- 5) Dynamisches Verhalten
- 6) Systeme mit integrierter Wegübersetzung
- 7) Simulation dynamischer Eigenschaften
- 8) Closed Loop Systeme
- 9) Messsysteme
- 10) Elektronische Ansteuerung
- 11) Lebensdauer und Zuverlässigkeit
- 12) Verwendungsrichtlinien
- 13) Hochleistungspiezos
- 14) Piezo-Shaker
- 15) Piezo-Stoßgeneratoren