10. Elektronische Ansteuerung – notwendig für Piezoaktoren
10.1 Signalrauschen
Wie in Kapitel 3.3. beschrieben, wird die Auflösung piezoelektrischer Aktoren nur durch das Spannungsrauschen der Stromversorgung limitiert. Die mechanische Bewegung ?X (Positionsrauschen) kann mit Hilfe des Signalrauschens der Stromversorgung ?U berechnet werden:
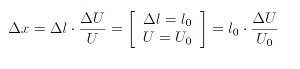
U ist die am Piezoelement anliegende Spannung, Δl die Wegänderung bei Signaländerung der Spannung U.
Die Spannungsverstärker der Steuereinheiten von piezosystem jena sind hinsichtlich einer geringeren Restwelligkeit / Rauschen optimiert und erlauben typische Auflösungen im nm Bereich. (siehe Abb. 10.1.1.)
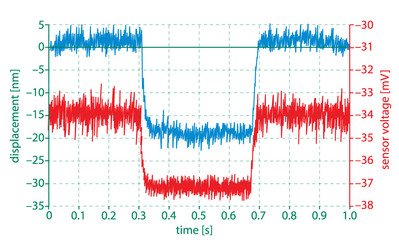
Abb. 10.1.1. Rauschen der Stromversorgung NV 40/3 CLE
Beispiel 23:
Die Piezosteuerung NV 40/3 CLE besitzt 3 unabhängige Kanäle (z.B. für ein TRITOR Element für 3D-Positionierung). Das Signalrestrauschen der Piezosteuerung beträgt pro Kanal <0,3mV. Die maximale Piezo-Ausgangsspannung beträgt 150V. Für ein Piezoelement mit einer Bewegung von 50µm ergibt sich ein mechanisches Rauschen mit einer Amplitude von 1nm.
10.2. Strombedarf
Um Piezoaktoren auch dynamisch betreiben zu können, verfügen Spannungsverstärker von piezosystem jena über einen Modulationseingang für jeden Kanal. Dadurch können z.B. mit einem Funktionsgenerator, über den Modulationseingang, Aktoren dynamisch angesteuert werden. Die elektrischen Eigenschaften der piezoelektrischen Aktoren geben vor, dass sie als Kondensatoren mit einem sehr hohen Innenwiderstand von typischerweise 109Ω arbeiten.
Typische kapazitive Werte sind:
Hochvoltaktoren: 60nF
Multilayer-Niedervoltaktoren: 1800nF
Um diese Kapazität aufzuladen (Erzeugung eines elektrischen Feldes = Ausdehnung des Piezoaktors) wird im stationären bzw. quasistationären Betrieb kaum Strom benötigt. Durch den hohen Innenwiderstand ist der Strombedarf durch den Piezoaktor zum Halten einer Position vernachlässigbar klein und wird hauptsächlich durch die äußere Beschaltung bestimmt. Nach der Trennung von der Stromzufuhr kann er sogar seine Position beibehalten (Bitte beachten Sie die Sicherheitshinweise!). Für dynamische Anwendungen muss aber die Problematik des Lade- und Entladevorgangs der Kapazität C der Keramik betrachtet werden. Der erforderliche Strom I, den der Aktor benötigt, wird wie folgt berechnet:

dU / dt – Spannungsanstieg (in V/s)
Bei dynamischer Betriebsweise kann die Größe des benötigten Stroms sehr hoch sein, so dass die Anstiegszeit der Spannung und weitere Größen der Bewegung oft durch den maximalen Strom der Stromversorgung festgelegt werden. Für eine sinusförmige Ansteuerung benötigt man folgenden Spitzenstrom Imax:

Imax – benötigter Strom bei sinusförmiger Ansteuerung (in A)
Upp – Peak-to-Peak-Ansteuerspannung (in V)
f – Anregungsfrequenz (in Hz)
C – Aktorkapazität (in F)
Ein typischer Klasse-A-Verstärker muss während des Ladevorgangs des Piezos Energie zur Verfügung stellen. Diese von der Energieversorgung bereitgestellte Energie wird während des Entladevorgangs im Verstärker als Wärme dissipiert. Die durchschnittliche Stromstärke Iav ergibt sich damit aus zeitlicher Mittelung des positiven Ladestroms über die gesamte Periodendauer:

Iav – mittlere, vom Verstärker bereitzustellende Stromstärke (in A)
10.3. Leistungsbedarf
Auf Grund des hohen Strombedarfs, der für dynamische Anwendungen benötigt wird, ist auch die benötigte elektrische Leistung hoch. Die mittlere Leistung Pav für eine unipolare, harmonische Ansteuerung eines Piezoelements mit der Frequenz f und der Kapazität C ergibt sich aus:
Pav– Spitzenleistung (in W)
Upp – Peak-to-Peak-Ansteuerspannung (in V)
f – Betriebsfrequenz (in Hz)
Die maximale Leistung Pmax ergibt sich aus Extremwertbetrachtung der Momentanleistung. Für unipolare, sinusförmige Anregung ergibt sich:
Beispiel 24:
Der für hohe Druckbelastung konzipierte Piezo-Stapelaktor PAHL 18/20 hat eine Kleinsignalkapazität von 7µF. Im Großsignalbetrieb kann sich dieser Wert verdoppeln.
Für eine Schwingung von 1kHz benötigt ein Antrieb mit 7µF Kapazität einen Strom von 3.3A. Für eine Kapazität von 14µF braucht man einen Strom von fast 7A. Damit verdoppelt sich auch der Leistungsbedarf, er beträgt nun in Spitze ca. 650W! Bei dieser großen Leistungsaufnahme muss die Eigenerwärmung des Aktors unbedingt berücksichtigt werden (siehe auch Kapitel 10.6 Verlustleistung).
10.4. Schaltbetrieb – Ansteuerung mit Rechtecksignal
Auf Grund ihrer Eigenschaften können Piezoelemente in Systeme integriert werden, bei denen sie zwischen 2 Positionen geschaltet werden (z.B. für Ventil-Anwendungen). Für die Ansteuerung eignen sich Schaltverstärker. Wenn ein kurzer Impuls an den Aktor übertragen wird, steigt die Ausgangsspannung U(t) (und auch die Spannung an dem Aktor) in Abhängigkeit der Zeit t, der Kapazität des Aktors C und dem inneren Widerstand der Stromversorgung Ri.
U0 – eingestellte maximale Ausgangsspannung
Ein kleiner Innenwiderstand Ri der Stromversorgung führt zu einem schnellen Anstieg der Ausgangsspannung. Somit kann die minimale Anstiegszeit des Aktors optimiert werden. Diese wird aber generell von der Resonanzfrequenz (siehe auch Abschnitt 5.1) des Aktors bestimmt. Die Ausdehnung erfolgt entsprechend der zugeführten Ladung und nimmt eine Zwischenposition ein, welche kleiner als die maximale Ausgangsspannung U0 der Stromversorgung ist. Auf diese Weise lassen sich mit elektrischen Leistungsschaltern, sogenannten Pulsern verschiedene Ausgangslagen des Piezoaktors durch Impulsfolgen „erschalten“.
10.5. Kopplungsfaktor
Die im piezoelektrischen Material gespeicherte mechanische Energie Wmech entsteht als Folge der angelegten elektrischen Energie. Der elektromechanische Kopplungsfaktor k33 beschreibt die Effektivität des Piezowandlers, elektrische Energie Welectr in mechanische Energie Wmech umzuwandeln.
Es ist auch ersichtlich, dass der Koppelfaktor von der Richtung und den Eigenschaften des Materials abhängt. Die obere Formel gilt für den Longitudinal-Effekt.
Diese Beziehung gilt unter statischen und quasistatischen Bedingungen; Leistungsverluste (z.B. durch Wärme) sind nicht berücksichtigt. Die elektrische Energie wird in Form von elektrischer Ladung bereitgestellt. Die nicht umgewandelte Energie ist z.B. in Form von Ladung vorhanden und fließt in den Spannungsverstärker zurück, während die Kapazität des Aktors entladen wird.
Die von piezosystem jena in Aktorsysteme eingesetzten Piezokeramiken erreichen einen Kopplungsfaktor mit einem Wert von bis zu k33 = 0,68.
10.6. Verlustleistung
Im statischen Fall speichert der Piezoaktor als Kapazität die elektrische Energie W = ½ ∙ C ∙ U². Während des Entladevorganges fließt diese Energie zum größten Teil wieder in den Spannungsverstärker zurück.
Nur ein kleiner Teil dieser Energie wird im Aktor in Wärme umgewandelt. Diese Verluste werden durch den Verlust δ charakterisiert. Die Verlustleistung berechnet sich zu:

Beispiel 25:
Betrachten wir noch einmal das Beispiel 24 (Kapitel 10.3). Zur Steuerung des PAHL 18/20 ist eine Leistung von ca. 1000W erforderlich.
Mit dem Leistungsbedarf von 1000W, der zum Betrieb dieses Hochlastelementes mit einer Frequenz von 1kHz notwendig wäre, wird im Aktor bei einem Volumen von 2ccm eine Verlustleistung von 50W in Wärme umgesetzt. Der Piezoaktor wird sich innerhalb kürzester Zeit über seine Curietemperatur erwärmen und unbrauchbar. In diesem Fall wird eine Kühlung des Aktors unbedingt notwendig!
Optimierung des Leistungsbedarfs
Durch die richtige Auswahl des Piezoelementes und der entsprechenden Steuerelektronik lässt sich der Leistungsbedarf minimieren. Eine Minimierung kann z.B. durch die Verwendung eines Aktors mit größerem Hub erreicht werden. Dieser benötigt für einen definierten Hub dann eine geringere Steuerspannung U.
Piezoprinzip-Themen
- 1) Piezoelektrischer Effekt
- 2) Bauformen
- 3) Eigenschaften und Leistung
- 4) Statisches Verhalten
- 5) Dynamisches Verhalten
- 6) Systeme mit integrierter Wegübersetzung
- 7) Simulation dynamischer Eigenschaften
- 8) Closed Loop Systeme
- 9) Messsysteme
- 10) Elektronische Ansteuerung
- 11) Lebensdauer und Zuverlässigkeit
- 12) Verwendungsrichtlinien
- 13) Hochleistungspiezos
- 14) Piezo-Shaker
- 15) Piezo-Stoßgeneratoren