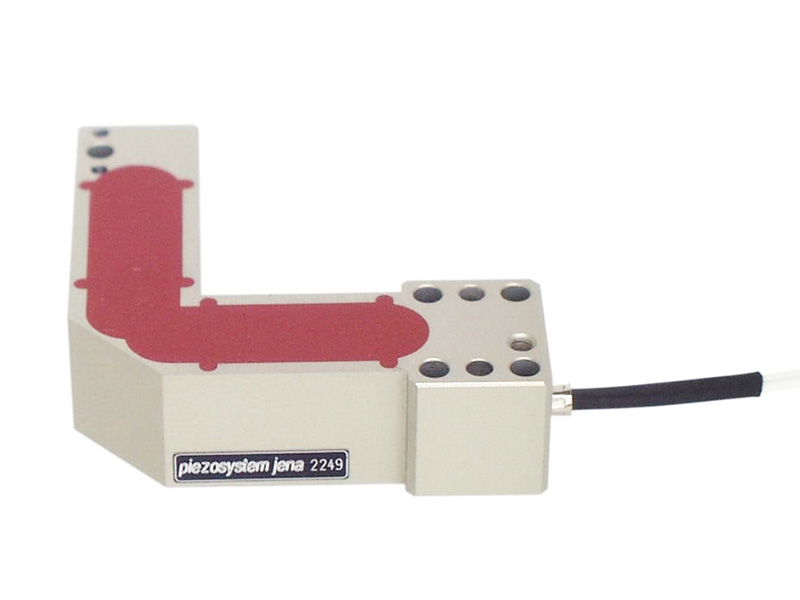
Der Nanopositionierer PXY 200 D12 wurde für Pixelshifting, STM und AFM Anwendungen entwickelt. Das Design der Piezoantriebe wurde speziell den Anforderungen für “Line Scans” angepasst, welche präzise Bewegung und Positionierung erfordern.
Ein zentrales Ziel beim Entwerfen des PXY 200 D12 war eine kurze Einschwingzeit nach einem Sprung oder einer Positionsänderung. Die Systeme sind für eine hohe Resonanzfrequenz und hohe Steifigkeit in den Bewegungsachsen XY optimiert.
Für spezielle Anwendungen können die Systeme für eine minimale Abweichung auf der Z-Achse bei Bewegung in XY optimiert werden.
Technische Daten
UNIT
PXY 200 D12
PXY 200 D12 SG
PXY 200 D12 CAP
Art. #
S-605-20
S-605-21
S-605-26
Achse
X, Y
X, Y
X, Y
Stellweg im Open-Loop (±10%)*
μm
200
200
200
Stellweg im Closed-Loop (±0.2%)*
μm
–
160
160
Auflösung Open-Loop**
nm
0.4
–
–
Auflösung Closed-Loop**
nm
–
4
1
Maße (L x B x H)
mm
57.5 x 64 x 16
57.5 x 64 x 16
75.5 x 69 x 27
Gewicht
g
160
160
225
*Typischer Wert mit NV 40/3 Controller gemessen (closed-loop: NV 40/3 CLE Controller) . **Auflösung nur durch das Rauschen von Verstärker und Messtechnik begrenzt.
Der Nanopositionierer PXY 80 D12 wurde für Pixelshift, STM und AFM Anwendungen entwickelt. Das Design der Piezoantriebe wurde speziell den Anforderungen für “Line Scans” angepasst, welche präzise Bewegung und Positionierung erfordern.
Ein zentrales Ziel beim Entwerfen des PXY 80 D12 war eine kurze Einschwingzeit nach einem Sprung oder einer Positionsänderung. Die Systeme sind für eine hohe Resonanzfrequenz und hohe Steifigkeit in den Bewegungsachsen XY optimiert.
Für spezielle Anwendungen können die Systeme für eine minimale Abweichung auf der Z-Achse bei Bewegung in XY optimiert werden.
Technische Daten
EINHEIT
PXY 80 D12
PXY 80 D12 SG
PXY 80 D12 CAP
Art. #
S-605-10
S-605-14
S-605-16
Achse
X, Y
X, Y
X, Y
Stellweg im Open-Loop (±10%)*
μm
80
80
80
Stellweg im Closed-Loop (±0.2%)*
μm
–
65
65
Auflösung Open-Loop**
nm
0.16
–
–
Auflösung Closed-Loop**
nm
–
1.6
1
Maße (L x B x H)
mm
54 x 53.5 x 16
54 x 53.5 x 16
64 x 63.5 x 22
Maße
g
90
90
155
*Typischer Wert mit NV 40/3 Controller gemessen (closed-loop: NV 40/3 CLE Controller) . **Auflösung nur durch das Rauschen von Verstärker und Messtechnik begrenzt.
Der Nanopositionierer PXY 40 D12 wurde für Pixelshifting, STM und AFM Anwendungen entwickelt. Das Design der Piezoantriebe wurde speziell den Anforderungen für “Line Scans” angepasst, welche präzise Bewegung und Positionierung erfordern.
Ein zentrales Ziel beim Entwerfen des PXY 400 D12 war eine kurze Einschwingzeit nach einem Sprung oder einer Positionsänderung. Die Systeme sind für eine hohe Resonanzfrequenz und hohe Steifigkeit in den Bewegungsachsen XY optimiert.
Für spezielle Anwendungen können die Systeme für eine minimale Abweichung auf der Z-Achse bei Bewegung in XY optimiert werden.
Technische Daten
EINHEIT
PXY 40 D12
Art. #
S-605-37
Achse
X, Y
Stellweg im Open Loop (±10%)*
μm
40
Auflösung Open Loop**
nm
0.08
Maße (L x B x H)
mm
54 x 53.5 x 20
Gewicht
g
90
*Typischer Wert mit NV 40/3 Controller gemessen. **Auflösung nur durch das Rauschen von Verstärker und Messtechnik begrenzt.
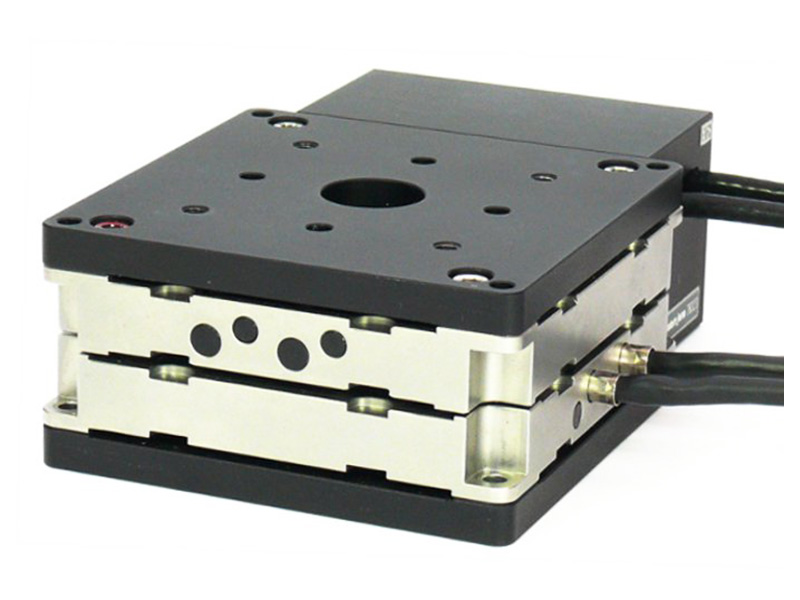
Der nanoSXY 400 kombiniert die hohe Genauigkeit und Geschwindigkeit eines Piezo-Positioniersystems mit einem speziellen Antriebsdesign für große Verfahrwege. Der Tisch bietet ein kompaktes Design mit einer Höhe von lediglich 20 mm, Außenmaßen von nur 60 x 60 mm und einem freien Innendurchmesser von 12,5 mm.
Durch die ultraflache Bauweise des Tisches und die einfache Kombination mit einem XY-Scansystem eignet sich das System für eine Vielzahl von Anwendungen.
Aufgrund des bi-direktionalen Piezo-Antriebsdesigns der Serie nanoX kann diese hohe Lasten mit einer Auflösung von 0.6 nm bewegen. Dieses Design sichert extreme Führungsgenauigkeit ohne Störbewegungen und verbessert aktiv die Einschwingzeit. Der nanoSXY 400 kann mit hochauflösenden Sensorsystemen ausgerüstet werden, die eine präzise Positionsüberwachung im Closed Loop erlauben.
Einsatzfelder für diese Systemserie finden sich im Bereich der hochauflösenden Messtechnik, X- und XY-Scanning sowie dynamischer Positionierung. Optional sind Vakuum- und Tieftemperaturausführungen verfügbar.
Technische Daten
EINHEIT
nanoSXY 400
nanoSXY 400 CAP
Art. #
T-224-00
T-224-06
Achse
X, Y
X, Y
Stellweg im Open-Loop (±10%)*
μm
400
400
Stellweg im Closed-Loop (±0,2%)*
μm
–
320
Auflösung Open-Loop**
nm
0.8
0.8
Auflösung Closed-Loop**
nm
–
1.0
Maße (L x B x H)
mm
60 x 60 x 20
60 x 82 x 30
Gewicht
g
300
410
*Typische Werte gemessen mit 30V300 nanoX Controller **Die Auflösung ist nur durch das Rauschen des Verstärkers und der Messtechnik begrenzt.
Der nanoSXY 120 kombiniert die hohe Genauigkeit und Geschwindigkeit eines Piezo-Positioniersystems mit einem speziellen Antriebsdesign für große Verfahrwege. Der Tisch bietet ein kompaktes Design mit einer Höhe von lediglich 20 mm, Außenmaßen von nur 60 x 60 mm und einem freien Innendurchmesser von 12,5 mm.
Durch die ultraflache Bauweise des Tisches und die einfache Kombination mit einem XY-Scansystem eignet sich das System für eine Vielzahl von Anwendungen.
Aufgrund des bi-direktionalen Piezo Antriebsdesigns der Serie nanoX kann diese hohe Lasten mit einer Auflösung von 0.25 nm bewegen. Dieses Design sichert extreme Führungsgenauigkeit ohne Störbewegungen und verbessert aktiv die Einschwingzeit. Der nanoSXY 120 kann mit hochauflösenden Sensorsystemen ausgerüstet werden, die eine präzise Positionsüberwachung im closed-loop erlauben.
Einsatzfelder für diese Systemserie finden sich im Bereich der hochauflösenden Messtechnik, X- und XY-Scanning sowie dynamischer Positionierung. Optional sind Vakuum- und Tieftemperaturausführungen verfügbar.
Technische Daten
EINHEIT
nanoSXY 120
nanoSXY 120 CAP
Art. #
T-223-00
T-223-06
Achse
X, Y
X, Y
Stellweg im Open-Loop (±10%)*
μm
120
–
Stellweg im Closed-Loop (±0,2%)*
μm
–
100
Auflösung Open-Loop**
nm
0.24
–
Auflösung Closed-Loop**
nm
–
1.0
Maße (L x B x H)
mm
60 x 60 x 20
60 x 87 x 30
Gewicht
g
250
350
*Typische Werte gemessen mit 30V300 nanoX Controller **Die Auflösung ist nur durch das Rauschen des Verstärkers und der Messtechnik begrenzt.